
简单介绍AGV小车的通讯系统
- 2022-09-14-
在自动搬运过程中,AGV小车经过通讯系统从基地主控计算机承受指令并报告本人的状态,而主控计算机向AGV下达任务,同时搜集AGV发回的信息以监视AGV的工作情况。
AGV装备的车载计算机,在硬件上普通用PLC控制器或单片机完成,它是AGV机器人行驶和停止工作的直接控制中枢,主要完成的功能为:
承受主控计算机下达的命令、任务,向主控计算机报告AGV小车本身状态,如AGV的位置、运转速度、方向、故障状态等;依据所承受的任务和运转道路自动运转到目的装卸站,在此过程中自动完成运转道路的选择、运转速度的选择、自动卸载货物、运转方向上小车的避让、安全报警等。
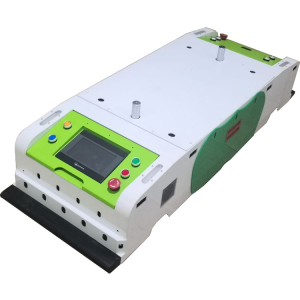
I-SO智能AGV小车具有编程才能,可按自在或固定途径完成任务。当AGV需求和系统中其他安装接口时,还需配有物料自动装卸与定位机构,其定位准确度由主控计算机控制。
普通AGV小车经过与基地主控计算机无线电通讯,或经过线路上埋设的导线停止感应通讯,也可经过红外激光,从而完成AGV机器人之间的避碰调度、工作状态检测、任务的调度。固定途径AGV多采用埋在地槽里的通讯电缆或固定位置的红外线安装停止通讯,自在途径AGV多采用无线电通讯。
由于无线电通讯在工业环境中使用会存在干扰,故采用超高频(300~3000赫兹)或更高的频率停止通讯,这样噪声的干扰将减小。加大无线电系统的功率,既提高信噪比,也可减小干扰。此外,改良无线电软件,如信息紧缩、采用信息帧构造方式或经过信息检验、通讯协议以及通讯管理等均可提高无线电通讯的牢靠性。
上一条: AGV搬运机器人的运用核心是什么
下一条: AGV搬运机器人存在哪些热门问题
 华威二维码
华威二维码 华威微信公众号
华威微信公众号