
AGV无人搬运车的控制系统
- 2021-01-28-
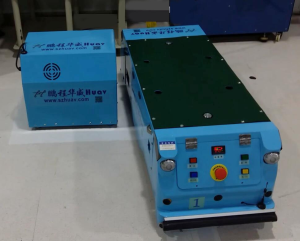
AGV无人搬运车操控系统类似于机器人操控器,用以对AGV无人搬运车进行监控。操控器核算机经过通讯系统从地上站承受指令并陈述自己的状况。一般操控器可完结以下工作:手动操控、安全设备发动、蓄电池状况、制动器解脱、行走灯光、驱动和转向电机操控和充电触摸器等。某些AGV无人搬运车具有编程能力,答应小车脱离扶引途径,驶向某个示教地址,完成任务后循原道返回到扶引途径上来。
AGV无人搬运车的操控指令一般是由地上操控器(车外)发出,AGV无人搬运车的状况也经过通讯系统送回地上操控器。通讯系统有两种:连续办法和涣散办法。连续通讯系统答应AGV无人搬运车在任何时候和相对地上操控器的任何方位使用射频办法或使用在扶引途径内的通讯电缆收发信息。如选用无线电、红外激光的通讯办法。
AGV无人搬运车的安全系统既要完结对AGV的维护,又要完结对人,或对其它地上设备的维护。其安全维护办法可概括为两类:触摸式和非触摸式两种维护系统。对自由途径(无固定扶引途径)型的AGV,还要进行车体方位的核算,它由车体方位核算子系统来完结。AGV无人搬运车的方位,即在整体坐标系中的方位与方向,与车体左右轮的运动有一确认的关系,由此可核算出AGV无人搬运车的方位。该子系统的功能是根据采样信息,经过积分运算,实时核算出车体方位[x(t),y(t)和θ(t)]。
上一条: 无人搬运车的充电方式主要有哪些
下一条: 大家对舵轮式AGV小车的使用了解吗






 华威二维码
华威二维码 华威微信公众号
华威微信公众号